
Purdue University's School of Industrial Engineering has recently developed a new class of soft robots and actuators that mimic the high-powered and high-speed movements found in nature. The team, led by assistant professor Ramses Martinez, claim their creation was inspired by the movement mechanism of certain body parts of some animals like the tongue of a chameleon and the tendons of a bird, as well as of some plants like the leaves of a Venus flytrap.
In a recent issue of Advanced Functional Materials, the researchers describe their technology. Chameleons make use of stored elastic energy to quickly launch their tongues and target insects flying about at a distance of up to 1.5 times its body length. The use of this stored elastic energy enables chameleons and other similar creatures like toads and salamanders to catch their prey within one-tenth of a second.
Fabrication of the Robots
The team used stretchable polymers that behave the same way as ordinary rubber bands. During fabrication, the robots were stretched in different directions in order to store elastic energy. The soft robots were then engineered so that they had internal pneumatic channels that respond to pressurized stimuli.
The Chameleon's Tongue

The researchers claim that their soft robots, which behave like a chameleon's tongue, is capable of stretching to about five times its original length. In an experiment, it was able to catch a beetle within 120 milliseconds.
The Bird's Grippers

In addition to the robot tongue are the robot grippers that the researchers have also developed. The grippers, inspired by the stressed tendons of birds, can hold up to 100 times their own weight. Its biological counterpart, the stressed tendons of the birds, allow them to perch on branches of trees, even while they are asleep.
These pre-stressed robots, as the researchers claim, are excellent at gripping, holding, and manipulating objects at considerably high speed. This was exemplified when the robot gripper was able to catch a ball moving at a speed of 10 millimeters per second, within only 65 milliseconds. The robots are also able to perch upside down at a maximum angle of 116 degrees. And, similar to a lot of birds, like the three-toed woodpecker, the soft robot grippers make use of zero additional energy, as it is using stored energy.
Because soft robots are, as their name suggests, soft, the robot grippers conform to the shape of the object being gripped. Because of this, the contact area is maximized, which then enhances the strength of the grip.
The Flytrap's Leaves
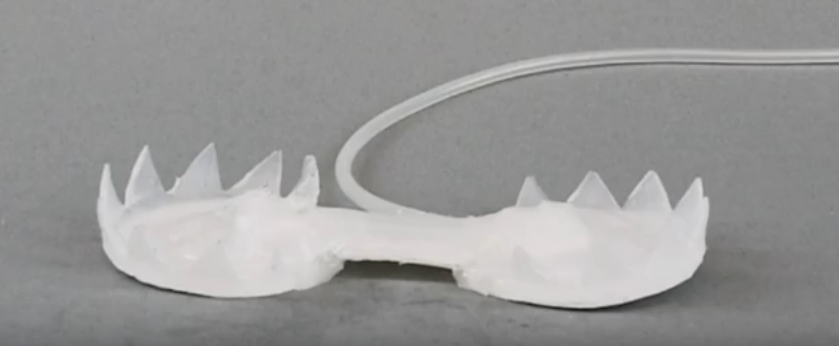
The Venus flytrap, acts the same way as chameleons and birds do, in a way that they use stored elastic energy to execute trap mechanism. This stored elastic energy allows them to quickly snap their bistable curved leaves when insects and other prey explore the surface of their leaves. The researchers were able to create a robotic counterpart, which closes within 50 milliseconds right after detecting a stimulus of light pressure.
Future Applications
Martinez and his team hope that their technology could, in the future, be used in automation, which has already proven its means in the field of manufacturing. "We believed that if we could fabricate robots capable of performing such large-amplitude motions at high speed like chameleons, then many automated tasks could be completed more accurately and in a much faster way," he explained.
The researchers also hope to inspire a new generation of soft robots that would be an improvement on existing robotic systems, which are rather limited by their rigidity, weight, and speed.
© 2026 ScienceTimes.com All rights reserved. Do not reproduce without permission. The window to the world of Science Times.












